
Estimation de pose de caméra à partir de correspondances ellipse - ellipsoïde
Résumé
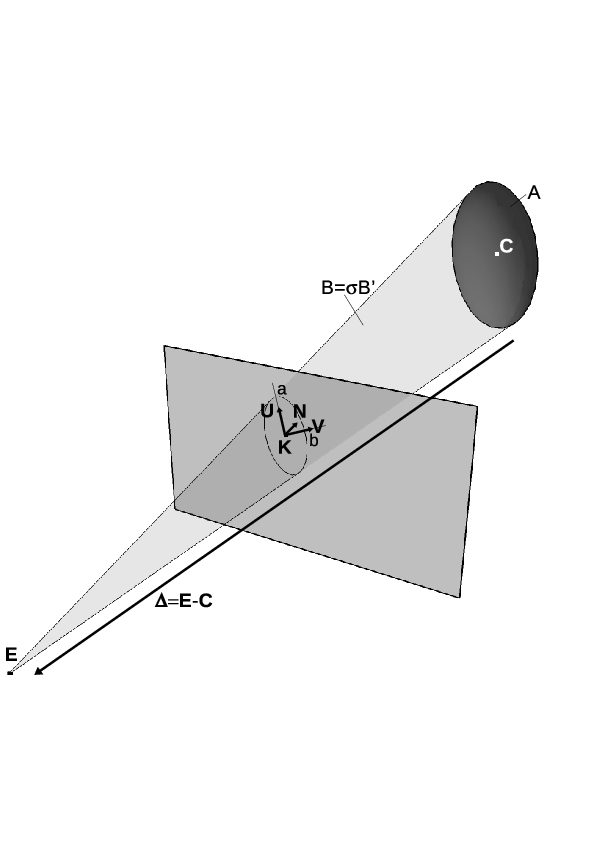
In computer vision, estimating camera pose from correspondences between 3D geometric entities and their projections into the image is a widely investigated problem. Although most state-of-the-art methods exploit simple primitives such as points or lines, and thus require dense scene models, the appearance of very effective CNN-based object detectors in the recent years has paved the way to the use of much lighter 3D models composed solely of a few semantically relevant features. In that context, we propose a novel model-based camera pose estimation method in which the scene is represented by a set of ellipsoids. We show that the problem can be solved by optimizing only the three camera orientation parameters, and that two correspondences between 2D ellipses and 3D ellipsoids are necessary in practice .
En vision par ordinateur, l'estimation de pose de caméra à partir de correspondances entre des entités géométriques 3D et leurs projections dans l'image est un problème largement étudié. Alors que la plupart des méthodes de l'état de l'art exploitent des primitives simples comme des points ou des droites, et nécessitent donc des modèles de scène relativement denses, les performances atteintes dernièrement par les détecteurs d'objets à base de réseaux de neurones convolutifs permettent d'envisager l'utilisation de modèles 3D beaucoup plus légers, composés seulement de quelques éléments sémantiquement pertinents. Dans ce contexte, nous proposons une nouvelle approche basée modèle pour l'estimation de pose de caméra, dans laquelle la scène est représentée par un ensemble d'ellipsoïdes. Nous montrons qu'il est possible d'optimiser uniquement les trois paramètres d'orientation de la caméra pour résoudre le problème, et que deux correspondances entre ellipses 2D et ellipsoïdes 3D sont nécessaires en pratique.
Fichier principal
 ORASIS2019_paper.pdf (486.69 Ko)
Télécharger le fichier
ORASIS2019_paper.pdf (486.69 Ko)
Télécharger le fichier
 schema.eps (267.58 Ko)
Télécharger le fichier
schema.eps (267.58 Ko)
Télécharger le fichier
 schema.jpg (35.14 Ko)
Télécharger le fichier
schema.jpg (35.14 Ko)
Télécharger le fichier
 schema.png (43.14 Ko)
Télécharger le fichier
schema.png (43.14 Ko)
Télécharger le fichier
{kind=link}
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Format : Figure, Image
Format : Figure, Image
Loading...