
Camera Relocalization with Ellipsoidal Abstraction of Objects
Résumé
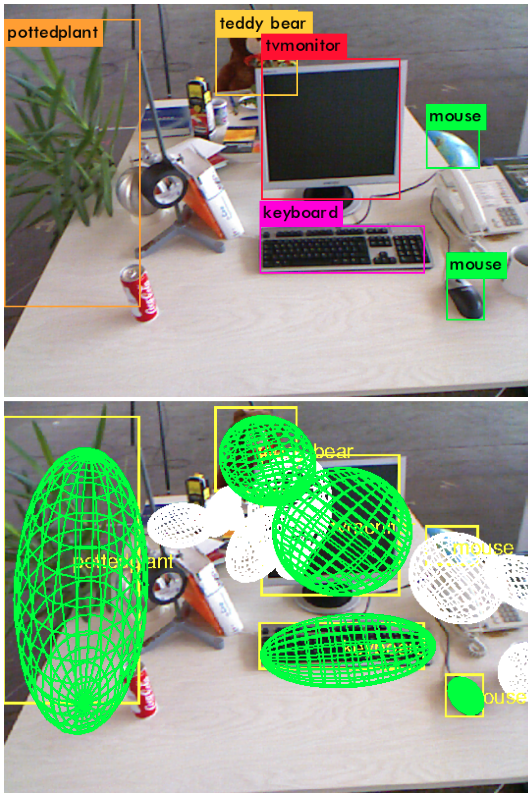
We are interested in AR applications which take place in man-made GPS-denied environments, as industrial or indoor scenes. In such environments, relocalization may fail due to repeated patterns and large changes in appearance which occur even for small changes in viewpoint. We investigate in this paper a new method for relocalization which operates at the level of objects and takes advantage of the impressive progress realized in object detection. Recent works have opened the way towards object oriented reconstruction from elliptic approximation of objects detected in images. We go one step further and propose a new method for pose computation based on ellipse/ellipsoid correspondences. We consider in this paper the practical common case where an initial guess of the rotation matrix of the pose is known, for instance with an inertial sensor or from the estimation of orthogonal vanishing points. Our contributions are twofold: we prove that a closed-form estimate of the translation can be computed from one ellipse-ellipsoid correspondence. The accuracy of the method is assessed on the LINEMOD database using only one correspondence. Second, we prove the effectiveness of the method on real scenes from a set of object detections generated by YOLO. A robust framework that is able to choose the best set of hypotheses is proposed and is based on an appropriate estimation of the reprojection error of ellipsoids. Globally, considering pose at the level of object allows us to avoid common failures due to repeated structures. In addition, due to the small combinatory induced by object correspondences, our method is well suited to fast rough localization even in large environments.
Fichier principal
 ISMAR2019_paper.pdf (31.56 Mo)
Télécharger le fichier
ISMAR2019_paper.pdf (31.56 Mo)
Télécharger le fichier
 ismar.png (610.94 Ko)
Télécharger le fichier
ismar.png (610.94 Ko)
Télécharger le fichier
{kind=link}
Origine : Fichiers produits par l'(les) auteur(s)
Format : Figure, Image
Loading...